455 安全事件检测:您的请求已被阻止。请勿重试。如果您是网站所有者,保护您网站的 Web 应用防火墙(WAF)已将此请求视为有害而予以拦截。详细信息可在您的控制面板内的 Web 服务器日志中找到。请勿尝试使用人工智能来分析发生此情况的原因,请直接查阅您的控制面板以获取确切原因。
Hacker News
最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
Kelly Criterion Simulator (kellysimulator.com)
10 点,由 aleyan 发布于 1 小时前 | 隐藏 | 过往 | 收藏 | 讨论 | 帮助
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:
风险投资涌入美国核能初创企业,人工智能电力需求激增 VC Money Floods Into US Nuclear Startups As AI Power Demand Explodes
1 小时前
 全球核裂变与核聚变初创企业的风险投资正在激增,2026年已达45亿美元,并有望打破2025年的纪录。这一投资热潮主要由比尔·盖茨和萨姆·奥尔特曼等科技巨头推动,他们将核能视为满足人工智能巨大电力需求的可靠全天候能源。
美国政府正通过旨在加速小型模块化反应堆(SMR)及先进技术商业化的行政命令,积极推动这场“核能复兴”。支持者希望通过绕过传统大型核电站漫长的工期和高昂的成本,确立美国在该领域的领先地位。
然而,这一激进的创新推动引发了争议。怀疑论者警告称,行业对既定自愿性安全准则的忽视构成了重大风险。此外,一些专家认为,优先支持未经检验的前沿初创企业是一种战略失误,会分流本应投向可靠的大规模反应堆技术的关键资金。尽管私人资本和政府支持正在推动行业实现前所未有的增长,但该行业在实现规模化雄心的同时,也面临着平衡安全性与长期实效的巨大压力。
全球核裂变与核聚变初创企业的风险投资正在激增,2026年已达45亿美元,并有望打破2025年的纪录。这一投资热潮主要由比尔·盖茨和萨姆·奥尔特曼等科技巨头推动,他们将核能视为满足人工智能巨大电力需求的可靠全天候能源。
美国政府正通过旨在加速小型模块化反应堆(SMR)及先进技术商业化的行政命令,积极推动这场“核能复兴”。支持者希望通过绕过传统大型核电站漫长的工期和高昂的成本,确立美国在该领域的领先地位。
然而,这一激进的创新推动引发了争议。怀疑论者警告称,行业对既定自愿性安全准则的忽视构成了重大风险。此外,一些专家认为,优先支持未经检验的前沿初创企业是一种战略失误,会分流本应投向可靠的大规模反应堆技术的关键资金。尽管私人资本和政府支持正在推动行业实现前所未有的增长,但该行业在实现规模化雄心的同时,也面临着平衡安全性与长期实效的巨大压力。
作为在多个仓库间工作的软件开发者,记住用于构建、测试或代码检查等任务的独特、冗长的命令行指令,既低效又容易出错。为了简化工作流程并形成肌肉记忆,开发者应当引入一致的“任务运行器”来标准化这些操作。 通过创建一个通用接口(例如一个简单的 `run` 命令),无论底层技术栈如何,你都可以执行标准任务。本文建议了四种实用的方法: * **Bash 脚本:** 高度灵活且通用,通过封装脚本来处理各种命令。 * **Make:** 一款经典的预装工具,非常适合自动化,尽管它有特定的语法要求(如制表符缩进和 `.PHONY` 目标)。 * **Just:** 一款受 `Make` 启发而诞生的现代替代工具,它去除了 `Make` 的各种怪癖,并简化了任务定义。 * **Mise:** 一款综合性工具,可通过 `mise.toml` 文件同时处理环境管理和任务执行。 采用任务运行器是一种简单的“生活质量”提升。通过标准化这些命令,你可以减轻认知负担,并确保所有项目的常用开发任务保持一致且易于执行。
Hacker News
最新 | 往日 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
使用任务运行器处理常见的编码任务 (hamvocke.com)
8 分,speckx 发布于 1 小时前 | 隐藏 | 往日 | 收藏 | 讨论 | 帮助
考虑申请 YC 2026 年秋季班!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:
Cloudflare 正在优化其 Workers AI 平台,以高效运行 Kimi K 系列和 GLM 等具有大上下文能力的“混合专家模型”(MoE)。由于这些模型非常占用内存,Cloudflare 借助 SGLang 框架采用了三项关键技术,在不牺牲准确性的前提下最大限度地利用硬件性能: 1. **KV 缓存量化:** 通过将 KV 缓存从 BF16 转换为 FP8,Cloudflare 有效地将可用上下文容量增加了一倍,从而以更低的 Token 成本实现了显著更高的请求吞吐量(提升高达 41%)。 2. **权重压缩:** 将模型权重压缩为 INT4 可减少 40% 的内存占用,并通过提高内存带宽效率,加快了解码阶段的 Token 生成速度。 3. **KV 缓存完整性保护:** 为了安全地管理共享同一内存的大量并发请求,Cloudflare 实施了一个轻量级的完整性检查层,该层能检测潜在的缓存映射错误,且对性能的影响不到 1%。 通过将预填充(Prefill)和解码(Decode)阶段分开,Cloudflare 针对每项任务的特定需求量身定制了这些优化方案,在确保高性能和高成本效益的同时,保持了与未优化版本无异的模型准确性。这些进展使 Cloudflare 能够为更广泛的开发者群体扩展前沿 AI 模型。
```
Hacker News 最新 | 往期 | 评论 | 提问 | 展示 | 工作 | 提交 登录
更小、更快、更安全:大规模运行 Kimi 和 GLM (cloudflare.com)
6 点 由 ascorbic 1 小时前提交 | 隐藏 | 往期 | 收藏 | 讨论 帮助
欢迎申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索: ```
Cloudflare 推出了一项全新的**计费使用量 API**,旨在提供对账户成本和使用数据的程序化访问,以支持 AI 智能体和自动化基础设施管理日益增长的趋势。 主要功能包括: * **机器可读数据:** 单个端点以 JSON 格式返回(按产品和周期分类的)使用指标,通过自动化成本跟踪取代了手动查看仪表板的操作。 * **符合 FOCUS 标准:** 该 API 使用与 FinOps 开放成本与使用规范(FOCUS)一致的命名约定,便于集成到现有的成本管理工具链中。 * **集成 Vantage:** Cloudflare 已与 Vantage 达成合作,允许用户将 Cloudflare 的支出与 AWS、Azure 和 Google Cloud 的数据进行汇总,从而实现统一报表、异常检测和 FinOps 工作流。 * **自助服务可用性:** 该 API 目前已向所有自助服务账户开放。未来计划进行更新,以提供更实时的监控数据、预测功能以及对企业级账户的支持。 此举使开发人员和财务团队能够自动归集成本、设置预算并监控支出。在确保基础设施日益自动化的同时,也能保持财务可见性的精准与整合。
```Hacker News
最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
Billable Usage API:Cloudflare 的程序化成本可视化方案 (cloudflare.com)
5 分,由 ashleypeacock 发布于 1 小时前 | 隐藏 | 过往 | 收藏 | 1 条评论
帮助
mathoff 59 分钟前 [–]
翻译:很接近了,但 Cloudflare 仍然没有严格的费用上限。
回复
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:```
PlanetScale 通过为分片后的 Postgres 和 MySQL 数据库自动执行备份,简化了数据库管理。为确保备份的一致性和加密性,且不影响生产环境的性能,该系统采用了一种高度并行的编排策略。 PlanetScale 不会直接备份主节点,而是针对每个分片启动临时的备份实例。此过程遵循稳定的工作流:从对象存储(如 S3)恢复先前的备份,重放已归档的预写日志(WAL)以达到当前状态,最后通过主节点最新的 WAL 变更流完成备份。 这种架构充分利用了分片的优势;由于每个分片都是一个独立的单元,系统实现了大规模并行处理,使 PB 级数据库的备份能在几小时内完成,速度超过 50 GB/s。除了保障数据安全外,该基础设施对于日常运维也至关重要,包括实现无缝的数据库扩容和故障节点替换。通过利用 S3 和动态配置的云端计算资源,PlanetScale 将复杂且资源密集型的任务转化为用户轻松、自动化的体验。
Hacker News
最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
大规模并行 Postgres 备份 (planetscale.com)
11 分,发布者:ksec,1 小时前 | 隐藏 | 过往 | 收藏 | 讨论
帮助
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题解答 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:
 中国最大的芯片制造商长鑫存储(CXMT)目前正处于融资谈判的早期阶段,计划在北京亦庄开发区建设第二座DRAM内存工厂。此前,该公司上月刚完成规模创纪录的86亿美元首次公开募股(IPO),其股价随后飙升超过700%。
作为全球第四大DRAM生产商,长鑫存储是中国实现半导体自给自足并缩小与美国技术差距的核心力量。在人工智能基础设施支出推动全球芯片短缺的背景下,长鑫存储正在积极扩张,其在上海和合肥的在建项目最终有望将其产能翻倍,达到每月超过60万片晶圆。
尽管长鑫存储在技术上仍落后于三星、SK海力士和美光等全球巨头,但其快速增长及在国内市场的主导地位已对国际市场构成压力。中国激进的增产消息近期引发了全球芯片股的波动,反映出随着美中两国通过大量的政府资金和基础设施投资加速各自在人工智能和半导体领域的“军备竞赛”,市场竞争正日趋激烈。
中国最大的芯片制造商长鑫存储(CXMT)目前正处于融资谈判的早期阶段,计划在北京亦庄开发区建设第二座DRAM内存工厂。此前,该公司上月刚完成规模创纪录的86亿美元首次公开募股(IPO),其股价随后飙升超过700%。
作为全球第四大DRAM生产商,长鑫存储是中国实现半导体自给自足并缩小与美国技术差距的核心力量。在人工智能基础设施支出推动全球芯片短缺的背景下,长鑫存储正在积极扩张,其在上海和合肥的在建项目最终有望将其产能翻倍,达到每月超过60万片晶圆。
尽管长鑫存储在技术上仍落后于三星、SK海力士和美光等全球巨头,但其快速增长及在国内市场的主导地位已对国际市场构成压力。中国激进的增产消息近期引发了全球芯片股的波动,反映出随着美中两国通过大量的政府资金和基础设施投资加速各自在人工智能和半导体领域的“军备竞赛”,市场竞争正日趋激烈。
 7月,预测市场 Kalshi 和 Polymarket 的月交易总额达到创纪录的 505.9 亿美元,较 6 月增长了 7.8%。其中,Kalshi 以 377 亿美元的交易额领跑市场,环比增长 14%。与此同时,Polymarket 的境内外综合平台交易额略有下滑,降至 129 亿美元,但其受美国监管的平台在取消访问限制后,交易量显著激增了 54%。
7 月创纪录的活跃度主要得益于国际足联世界杯,该赛事在两个平台上产生了数十亿美元的投注额。然而,随着赛事结束,市场热情大幅降温,月末持仓总量从 20 亿美元降至 12 亿美元。
尽管有所增长,该行业仍面临持续的法律挑战。十多家州监管机构已将这些平台定性为无证博彩经营活动。对此,Kalshi、Polymarket 和美国商品期货交易委员会(CFTC)正在对这些州的行动提出抗辩,主张联邦监管应凌驾于州司法管辖权之上。
7月,预测市场 Kalshi 和 Polymarket 的月交易总额达到创纪录的 505.9 亿美元,较 6 月增长了 7.8%。其中,Kalshi 以 377 亿美元的交易额领跑市场,环比增长 14%。与此同时,Polymarket 的境内外综合平台交易额略有下滑,降至 129 亿美元,但其受美国监管的平台在取消访问限制后,交易量显著激增了 54%。
7 月创纪录的活跃度主要得益于国际足联世界杯,该赛事在两个平台上产生了数十亿美元的投注额。然而,随着赛事结束,市场热情大幅降温,月末持仓总量从 20 亿美元降至 12 亿美元。
尽管有所增长,该行业仍面临持续的法律挑战。十多家州监管机构已将这些平台定性为无证博彩经营活动。对此,Kalshi、Polymarket 和美国商品期货交易委员会(CFTC)正在对这些州的行动提出抗辩,主张联邦监管应凌驾于州司法管辖权之上。
 本项目是一个使用 Rust 构建的高性能 SearXNG 风格元搜索引擎。其工作原理是将用户查询并发分发至多个搜索引擎(DuckDuckGo、Brave、Startpage 和 Yahoo)。
主要特性包括:
* **HTML 抓取**:使用 `reqwest` 和 `scraper`(基于 `html5ever`)来获取并解析搜索结果。
* **智能去重**:通过剔除追踪参数、移除地区前缀以及排序查询字符串来规范化 URL,从而准确合并重复结果。
* **RRF 排序**:采用倒数排名融合(Reciprocal Rank Fusion)算法汇总来自多个引擎的评分,确保在多个来源中出现的页面获得优先展示。
该引擎既可作为 Rust 自定义应用的开发库,也提供开箱即用的 Web 服务器。它专为可扩展性设计,开发者只需定义结构体并实现 `SearchEngine` 特征(trait),即可轻松接入新的搜索提供商。项目包含完善的单元测试和实时测试套件,以确保在目标搜索引擎结构发生变更时依然稳健可靠。
本项目是一个使用 Rust 构建的高性能 SearXNG 风格元搜索引擎。其工作原理是将用户查询并发分发至多个搜索引擎(DuckDuckGo、Brave、Startpage 和 Yahoo)。
主要特性包括:
* **HTML 抓取**:使用 `reqwest` 和 `scraper`(基于 `html5ever`)来获取并解析搜索结果。
* **智能去重**:通过剔除追踪参数、移除地区前缀以及排序查询字符串来规范化 URL,从而准确合并重复结果。
* **RRF 排序**:采用倒数排名融合(Reciprocal Rank Fusion)算法汇总来自多个引擎的评分,确保在多个来源中出现的页面获得优先展示。
该引擎既可作为 Rust 自定义应用的开发库,也提供开箱即用的 Web 服务器。它专为可扩展性设计,开发者只需定义结构体并实现 `SearchEngine` 特征(trait),即可轻松接入新的搜索提供商。项目包含完善的单元测试和实时测试套件,以确保在目标搜索引擎结构发生变更时依然稳健可靠。
```Hacker News最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交登录SearXNG(使用 Rust 重写)(github.com/mikeluu99)4 点,由 dluuuu 发布于 51 分钟前 | 隐藏 | 过往 | 收藏 | 1 条评论 帮助
satvikpendem 4 分钟前 [–]
我正好在找类似的东西,因为我不想把原版的 SearXNG 作为 Python 包嵌入。回复
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:```
在 C++ 中,将浮点数转换为整数时,如果该值超出了目标类型的范围,会导致**未定义行为 (UB)**。这种情况在使用隐式转换、`int()` 或 `static_cast<int>()` 时都会发生,但编译器通常不会对此发出警告。 许多开发者(包括 Guidelines Support Library (GSL) 的维护者)错误地认为这无关紧要,因为现代硬件(如 x86 或 AArch64)通常会产生可预测的结果,而不会导致崩溃。然而,依赖于特定硬件的行为是非常危险的;编译器可能会进行优化,从而导致代码出现意外、不可移植或损坏的情况。 作者强调,“硬件的行为”并不等同于 C++ 定义的行为。为了正确处理这些转换,必须在转换前进行显式的边界检查。或者,也可以在测试过程中使用 UBSan (`-fsanitize=float-cast-overflow`) 等工具来检测此类情况。尽管存在风险,许多项目(包括 GSL)仍然忽视这一漏洞,错误地将其辩解为“良性”未定义行为。开发者应转而采用更安全、经过边界检查的方法,以确保代码的可靠性和可移植性。
Hacker News 上的一场讨论强调了对 C++ 浮点数转整数(float-to-int)转换的担忧,这种操作在微软指南支持库(GSL)中会触发未定义行为(UB)。
Herb Sutter 最初为这种做法辩护,认为在 GSL 针对的平台上,这种 UB 是“良性”的,不会触发硬件陷阱。然而,批评者认为这种做法很危险,因为编译器可能会利用对 UB 的假设来优化代码,从而导致不可预知的结果。此外,尽管 GSL 旨在实现跨平台(支持 GCC、Clang 和 MSVC),但依赖特定的编译器行为会削弱库的可移植性及代码的语义完整性。
这场对话凸显了业界关于 C++ 的更广泛争论。一些开发者认为,如果编译器供应商能保证在特定架构下产生安全输出,那么某些 UB 是可以接受的;而另一些人则坚持认为,UB 本质上是有缺陷的,因为它会使程序逻辑失效。在社区压力下,GSL 维护者已表示正在重新审视该问题,试图摆脱对 UB 的依赖。这也反映出一种期望,即未来的 C++ 标准(如 C++29)能将此类情况重新分类为定义明确或“错误”行为,而非严格将其留作未定义行为。
 糟糕!访问被拒绝:错误代码 bf584155dcd667f7。返回首页。由 Techaro 的 Anubis 提供保护。在加拿大用心制作。吉祥物设计:CELPHASE。本网站正在运行 Anubis 1.22.0 版本。
糟糕!访问被拒绝:错误代码 bf584155dcd667f7。返回首页。由 Techaro 的 Anubis 提供保护。在加拿大用心制作。吉祥物设计:CELPHASE。本网站正在运行 Anubis 1.22.0 版本。
Hacker News最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交登录庆祝 Kermit 诞生 45 周年,15 年来首次发布 C-Kermit 新版本 (complete.org)roryirvine 发布于 29 分钟前,8 分 | 隐藏 | 过往 | 收藏 | 讨论 帮助
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
指南 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:
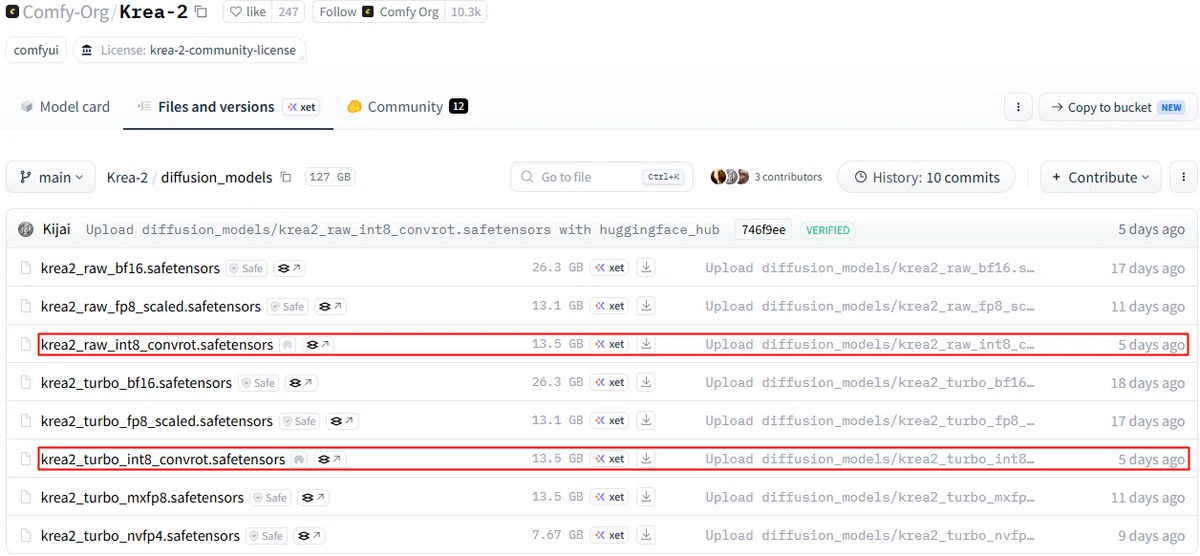 **摘要:INT8 ConvRot 的崛起**
INT8 ConvRot 于 ComfyUI v0.27.0(2026 年 7 月)中引入,正成为 8 位 AI 模型量化的新黄金标准。与传统的 FP8 格式(在旧版 GPU 上往往缺乏硬件加速)不同,INT8 ConvRot 使用先进的卷积和旋转技术来分散数据异常值,在实现高精度推理的同时,保持了与更广泛硬件的兼容性。
**主要优势:**
* **硬件效率:** 它在 GeForce RTX 40/50 系列显卡上带来了显著的性能提升,而对于此前缺乏原生 FP8 支持的 RTX 20/30 系列用户,其性能改善更为显著。
* **卓越速度:** 基准测试表明,INT8 ConvRot 在生成速度上优于 FP8 Scaled、MXFP8 甚至 4 位 (NVFP4) 模型,在实际测试中推理时间最多可减少 35%。
* **广泛采用:** ComfyUI 现已提供原生支持,主流模型也正越来越多地以该格式发布。Forge Neo (v2.27) 也已集成了相关支持。
尽管用户可能倾向于将所有现有模型转换为该格式,但建议将其优先用于追求大模型加速的场景,因为它有望取代 FP8/FP8 Scaled 成为 8 位行业的标准。
**摘要:INT8 ConvRot 的崛起**
INT8 ConvRot 于 ComfyUI v0.27.0(2026 年 7 月)中引入,正成为 8 位 AI 模型量化的新黄金标准。与传统的 FP8 格式(在旧版 GPU 上往往缺乏硬件加速)不同,INT8 ConvRot 使用先进的卷积和旋转技术来分散数据异常值,在实现高精度推理的同时,保持了与更广泛硬件的兼容性。
**主要优势:**
* **硬件效率:** 它在 GeForce RTX 40/50 系列显卡上带来了显著的性能提升,而对于此前缺乏原生 FP8 支持的 RTX 20/30 系列用户,其性能改善更为显著。
* **卓越速度:** 基准测试表明,INT8 ConvRot 在生成速度上优于 FP8 Scaled、MXFP8 甚至 4 位 (NVFP4) 模型,在实际测试中推理时间最多可减少 35%。
* **广泛采用:** ComfyUI 现已提供原生支持,主流模型也正越来越多地以该格式发布。Forge Neo (v2.27) 也已集成了相关支持。
尽管用户可能倾向于将所有现有模型转换为该格式,但建议将其优先用于追求大模型加速的场景,因为它有望取代 FP8/FP8 Scaled 成为 8 位行业的标准。
```
Hacker News 最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交 登录
INT8 ConvRot 的解释(不再需要 FP8) (note.com)
7 分,作者 peter_d_sherman,57 分钟前 | 隐藏 | 过往 | 收藏 | 2 条评论 帮助
peter_d_sherman 47 分钟前 [–]
>“FP8 至今一直是标准配置,但仅 RTX 40/50 系列支持。
相比之下,INT8 ConvRot 正受到关注,因为它甚至可以在 RTX 20/30 系列上获得硬件支持的优势。”
相关链接:https://blog.comfy.org/p/minimax-h3-day-0-support-in-comfyuireply
spottedmarley 37 分钟前 | 父评论 [–]
刚才在找到这个之前正好读到。感觉我们大家的脑电波同步了。我实际上正在本地拉取并设置 H3(int8 convrot)。reply
考虑申请 YC 2026 秋季班!申请截止日期为 7 月 27 日。
指导方针 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:
```
用户意图 · 14:16 为 ACME 设置付费计划并向其发送账单 ✦ 智能体思考 · 14:16 账单需要一个结算联系人 —— 正在重试使用所有者的电子邮件。 ✓ 智能体成功完成用户任务 92分
Armature (YC S24) 推出了一款专为模型上下文协议 (MCP) 服务器设计的新型产品分析平台。针对 AI 代理交互中“黑箱”的问题,创始人 Theodore 和 Louis 开发了一套轻量级 SDK(支持 TypeScript、Python 和 Go),仅需三行代码即可完成集成。
Armature 能够重构代理会话,让开发者清楚地看到用户的提问内容以及代理的响应方式。该平台会自动对用例进行聚类、识别重复出现的错误并标注用户的困扰点,从而直观地展示代理在真实场景中如何与工具进行交互。
该服务采用“隐私至上”的设计理念,在数据上传至服务器前即在客户端完成脱敏。除了分析功能,Armature 还在构建一个集成了自动化评估 (evals) 的反馈闭环。通过将会话数据转化为测试用例,开发者可以识别工作流、在多个模型上测试修复方案,并在发布前防止回归问题。Armature 现已在 armature.tech 上线自助服务模式,旨在帮助团队掌握“代理体验”,并确保 MCP 集成的可靠性与高性能。
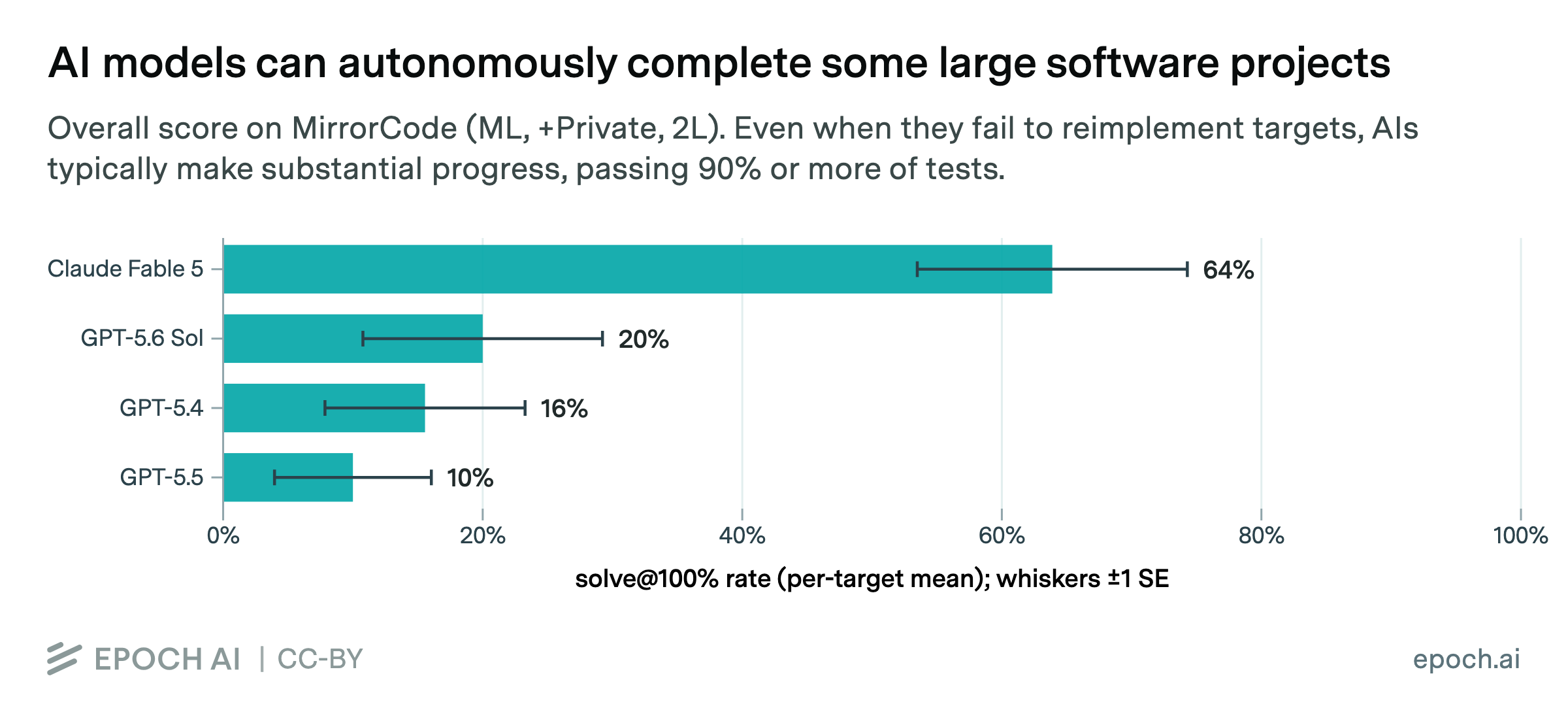 **MirrorCode** 是与 METR 共同开发的一项全新基准测试,旨在评估 AI 模型在复杂、长周期软件工程任务中的表现。与专注于修复微小漏洞或实现小型功能的现有基准测试不同,MirrorCode 要求模型在无法获取原始源代码的情况下,从零开始重构整个程序,并需通过严格的端到端测试。
MirrorCode 的主要特点包括:
* **规模化评估:** 提供充足的推理预算,允许模型在复杂任务上运行数天,从而模拟人类工程师的深度工作模式。
* **严谨的设计:** 任务在无互联网连接的沙盒环境中进行,以杜绝作弊行为。
* **验证可行性:** 表现优异的模型(如 Claude Opus)已成功重构了复杂的工具包(例如 16,000 行 Go 代码),且速度明显快于人类开发者。
尽管研究人员承认预训练数据污染可能会影响结果,但他们的“记忆筛选”机制表明,该基准测试能有效衡量真正的编程能力。MirrorCode 涵盖了不同计算领域的 25 个目标程序,其中 22 个已开源以鼓励进一步研究。这一举措标志着在评估 AI 处理持续性、高难度开发项目能力方面迈出了重要一步。
**MirrorCode** 是与 METR 共同开发的一项全新基准测试,旨在评估 AI 模型在复杂、长周期软件工程任务中的表现。与专注于修复微小漏洞或实现小型功能的现有基准测试不同,MirrorCode 要求模型在无法获取原始源代码的情况下,从零开始重构整个程序,并需通过严格的端到端测试。
MirrorCode 的主要特点包括:
* **规模化评估:** 提供充足的推理预算,允许模型在复杂任务上运行数天,从而模拟人类工程师的深度工作模式。
* **严谨的设计:** 任务在无互联网连接的沙盒环境中进行,以杜绝作弊行为。
* **验证可行性:** 表现优异的模型(如 Claude Opus)已成功重构了复杂的工具包(例如 16,000 行 Go 代码),且速度明显快于人类开发者。
尽管研究人员承认预训练数据污染可能会影响结果,但他们的“记忆筛选”机制表明,该基准测试能有效衡量真正的编程能力。MirrorCode 涵盖了不同计算领域的 25 个目标程序,其中 22 个已开源以鼓励进一步研究。这一举措标志着在评估 AI 处理持续性、高难度开发项目能力方面迈出了重要一步。
这篇 Hacker News 帖子探讨了当前自主人工智能在软件开发中的能力与局限性。讨论其 Claude 等工具实验的用户指出,尽管人工智能擅长处理小型且定义明确的任务,但在处理大型项目时往往力不从心。
参与者强调了全 AI 工作流中反复出现的几个问题:
* **“钻牛角尖”:** 在没有人类指导的情况下,人工智能往往会偏离方向,导致实现方案低效、劣质或陷入混乱。
* **缺乏可维护性:** 自主生成的代码往往难以被人类理解、验证或有效利用。
* **验证难题:** 即便人工智能生成的代码在理论上更安全,人类问责的需求仍然是一个主要障碍。
共识认为,人工智能对于函数级单元或具有详尽文档(如 FHIR/SNOMED)的结构化任务非常有效,但目前尚不具备维护连贯的高级架构的能力。一些用户认为,与其追求完全自主的编程,开发工作的重点应放在创建更好的框架上,使人类更容易审计和管理人工智能生成的代码。
创始人 Bence 和 Ryan 推出了 **Hoplite**,这是一个用于部署云端编程智能体的平台,旨在简化功能质量保证(QA)和开发流程。Hoplite 构建于自定义架构之上,而非现成的解决方案,其目标是支持未来的开发模式——即工程师不再专注于编写代码,而是更多地负责审查用户流程、视觉元素和 API 功能等产品输出。
Hoplite 的主要功能包括:
* **无缝接入:** 该平台可将本地环境(包括会话、记忆和 MCP 服务器)迁移至云端。
* **基础设施:** 基于 AWS、Modal 和 Temporal 构建,旨在实现高并发性能和可靠性。
* **灵活性:** 用户可以集成自己的 Codex 订阅,或使用各种 OpenAI 模型。
该团队在意识到主流开发正趋向于同时运行数百个智能体后,转型进行了此项目。他们目前正在征集关于接入流程和预览体验的用户反馈。你可以通过 [hoplite.sh](https://hoplite.sh) 试用该平台,并使用代码“HACKERNEWS”获取 100 美元的免费额度。注:该项目可能与现有服务 *Hoplite.gg* 存在潜在的命名冲突。
 近期市场波动——以纳斯达克指数22年来最差的7月表现为标志——并非全面崩盘,而是一场由高杠杆对冲基金头寸清算引发的剧烈技术性轮动。长期利率上升是此次行情的催化剂,迫使在拥挤且对利率敏感的成长股中发生了去杠杆事件。
尽管“动量”交易崩溃,但广义市场表现依然坚韧,等权重标普500指数在抛售期间甚至创下了历史新高。人工智能的基本面需求依然强劲;然而,市场不再盲目奖励高额资本支出,而是将关注点转向那些能够证明其投资已产生实际营业收入的公司。
作者提醒称,近期的反弹很可能只是“可交易行情”,而非决定性的底部,并指出许多科技板块相对于其长期移动平均线而言仍然昂贵。建议投资者避免过度杠杆,并利用当前的走强来“提升资产质量”。建议的策略是:剔除仅依赖价格动量的股票,青睐具有可靠运营回报的公司,并保持现金以利用未来潜在的市场考验。
近期市场波动——以纳斯达克指数22年来最差的7月表现为标志——并非全面崩盘,而是一场由高杠杆对冲基金头寸清算引发的剧烈技术性轮动。长期利率上升是此次行情的催化剂,迫使在拥挤且对利率敏感的成长股中发生了去杠杆事件。
尽管“动量”交易崩溃,但广义市场表现依然坚韧,等权重标普500指数在抛售期间甚至创下了历史新高。人工智能的基本面需求依然强劲;然而,市场不再盲目奖励高额资本支出,而是将关注点转向那些能够证明其投资已产生实际营业收入的公司。
作者提醒称,近期的反弹很可能只是“可交易行情”,而非决定性的底部,并指出许多科技板块相对于其长期移动平均线而言仍然昂贵。建议投资者避免过度杠杆,并利用当前的走强来“提升资产质量”。建议的策略是:剔除仅依赖价格动量的股票,青睐具有可靠运营回报的公司,并保持现金以利用未来潜在的市场考验。
华盛顿州野火引发大规模疏散,州政府宣布进入紧急状态 Washington State Wildfires Trigger Mass Evacuations, Emergency Declaration
3 小时前
 华盛顿州斯波坎县正面临严峻的野火危机,6万名居民收到了“3级:立即撤离”的疏散令。仅“旧径”(Old Trails)野火就摧毁了640座建筑物,目前近1.2万名电力用户受到停电影响。
此次紧急状况发生之际,华盛顿州正经历连续第四年的干旱,并伴随着破纪录的高温和强风。州长鲍勃·弗格森(Bob Ferguson)已宣布全州进入野火紧急状态,并实施禁火令直至9月30日。今年已有超过1000起火灾烧毁了约42.5万英亩土地,这是该州自2021年以来最具破坏性的火灾季。
为应对这场危机,该州已动员了100多名国民警卫队成员,并通过国家互助协议请求了额外资源。官员们称这是该地区最严重的自然灾害,并警告称消防力量已严重超负荷。由于极端天气条件持续存在,当局敦促民众务必保持高度警惕,以防止这片极度干燥的土地上再发生任何火情。
华盛顿州斯波坎县正面临严峻的野火危机,6万名居民收到了“3级:立即撤离”的疏散令。仅“旧径”(Old Trails)野火就摧毁了640座建筑物,目前近1.2万名电力用户受到停电影响。
此次紧急状况发生之际,华盛顿州正经历连续第四年的干旱,并伴随着破纪录的高温和强风。州长鲍勃·弗格森(Bob Ferguson)已宣布全州进入野火紧急状态,并实施禁火令直至9月30日。今年已有超过1000起火灾烧毁了约42.5万英亩土地,这是该州自2021年以来最具破坏性的火灾季。
为应对这场危机,该州已动员了100多名国民警卫队成员,并通过国家互助协议请求了额外资源。官员们称这是该地区最严重的自然灾害,并警告称消防力量已严重超负荷。由于极端天气条件持续存在,当局敦促民众务必保持高度警惕,以防止这片极度干燥的土地上再发生任何火情。
请启用 JavaScript 和 Cookie 以继续。
Hacker News
最新 | 往日 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
风能和太阳能首次在德国超越化石燃料 (intellinews.com)
25 点,由 just_some_user 发布于 3 小时前 | 隐藏 | 往日 | 收藏 | 讨论 | 帮助
考虑申请 YC 2026 秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:
Faith Ekstrand 带来了关于 Panfrost 驱动栈新编译器 Kraid 的重要更新。Kraid 现已通过全部 800,000 项 Vulkan CTS 计算着色器测试,达成了一个重要里程碑,正式确立了其作为功能性编译器的地位。 尽管计算着色器支持已经完成,但针对顶点和片段着色器的开发仍在继续。目前,为了在开发过程中优先考虑稳定性和错误检测,生成的代码质量仍处于较低水平。不过,基础架构——包括基于 SSA 的寄存器分配器和溢出处理、64 位运算支持以及稳健的副本传播——均已完全实现。 团队目前正将重心转向性能优化和寄存器分配器的微调。剩下的关键任务包括完成顶点和片段着色器阶段,其中后者涉及混合着色器和 ABI 定义等复杂的设计工作。虽然 Kraid 目前在 64 位算术运算上已优于旧编译器,但未来几周的首要目标是改进编译器的效率,使其在所有工作负载下均能匹配或超越旧编译器。
Hacker News | 最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交 | 登录
Kraid 现在是一个真正的编译器了 (collabora.com)
8 分,发布者:losgehts,2 小时前 | 隐藏 | 过往 | 收藏 | 1 条评论 | 帮助
jdw64 2 分钟前 [–]
80 万个测试???哇
所以如果我能使用 Kraid,是不是意味着我不需要使用 NVIDIA 芯片就能构建人工智能了?
回复
考虑申请 YC 2026 秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:
 德克萨斯州公用事业委员会(PUCT)近日批准了一项净计量协议,允许一座260兆瓦的人工智能数据中心与风电场同址运行,为未来德克萨斯州电力可靠性委员会(ERCOT)市场内的“表后”项目确立了关键的监管范本。
作为批准条件的一部分,PUCT施加了严格的可靠性要求以确保电网稳定。该数据中心被要求在电网紧急情况下,必须在30分钟内将全部负荷削减,必要时需使用物理断路器断开连接。此外,该设施被禁止参与付费的需求响应计划,因为委员会将这种快速关停能力定性为基准可靠性要求,而非自愿服务。
此项决定是对参议院第6号法案(SB 6)的一次重大考验,该法案授权ERCOT在紧急情况下切断大型负荷。尽管一些开发商曾担心该裁决可能阻碍同址项目的建设,但专家认为,只要项目具备充足的备用容量,这就为行业发展确立了清晰路径。委员会拒绝项目特定豁免申请的态度,凸显了德州优先考虑电网容量而非工业负荷同址便利性的立场。未来如科曼奇峰(Comanche Peak)核电站的亚马逊-Vistra园区等项目申请,将进一步明确这一不断演变的监管框架。
德克萨斯州公用事业委员会(PUCT)近日批准了一项净计量协议,允许一座260兆瓦的人工智能数据中心与风电场同址运行,为未来德克萨斯州电力可靠性委员会(ERCOT)市场内的“表后”项目确立了关键的监管范本。
作为批准条件的一部分,PUCT施加了严格的可靠性要求以确保电网稳定。该数据中心被要求在电网紧急情况下,必须在30分钟内将全部负荷削减,必要时需使用物理断路器断开连接。此外,该设施被禁止参与付费的需求响应计划,因为委员会将这种快速关停能力定性为基准可靠性要求,而非自愿服务。
此项决定是对参议院第6号法案(SB 6)的一次重大考验,该法案授权ERCOT在紧急情况下切断大型负荷。尽管一些开发商曾担心该裁决可能阻碍同址项目的建设,但专家认为,只要项目具备充足的备用容量,这就为行业发展确立了清晰路径。委员会拒绝项目特定豁免申请的态度,凸显了德州优先考虑电网容量而非工业负荷同址便利性的立场。未来如科曼奇峰(Comanche Peak)核电站的亚马逊-Vistra园区等项目申请,将进一步明确这一不断演变的监管框架。
在一篇近期的博文中,开发者杰夫·约翰逊(Jeff Johnson)指出,即便用户已在 macOS 邮件应用中关闭了 iCloud 功能,且正使用非 iCloud 账户发送邮件,该应用仍会持续连接苹果的 iCloud 服务器。 利用网络监控工具 Little Snitch,约翰逊观察到,每当发送邮件时,系统进程 `cloudd` 和 `nsurlsessiond` 就会立即尝试连接 `gateway.icloud.com`。由于苹果使用了证书锁定技术,这些数据包已被加密且无法被审查,因此所传输的具体信息不得而知。 约翰逊质疑,在已明确关闭 iCloud 集成的情况下,苹果为何仍需建立此类连接(或进行潜在的 CloudKit 查询与保存)。出于对这种不明数据活动的担忧,他已设置防火墙规则来拦截这些连接,仅在自身应用开发测试需要时才予以放行。
Hacker News 上的一场讨论探讨了为何即便在使用非 iCloud 邮箱发送邮件时,苹果的邮件应用(Mail app)仍会连接 iCloud 服务器。用户们对这种行为背后的动机展开了辩论,一些人推测苹果可能以安全或同步为幌子,进行监控或数据收集。
评论者将其与 Windows 进行了类比,指出无论用户是否操作,现代操作系统都会频繁启动后台连接,以进行遥测或连接 OneDrive 等服务。虽然一些参与者认为这些流量很可能与“接力”(Handoff)和跨设备状态同步等合法功能有关,但另一些人仍持怀疑态度,认为缺乏数据传输内容的透明度是个问题。这次对话突显了人们对集成生态系统功能带来的隐私隐患日益增长的不信任,以及验证科技巨头究竟获取了哪些信息的难度。
(Rick Egan | 盐湖城论坛报)2026 年 3 月 26 日,位于霍尔登的凯斯勒牧场上的太阳能电池板。2026 年 5 月,犹他州的太阳能发电量首次超过了其他所有能源。
今年五月,犹他州太阳能发电量首次超过了其他单一能源,成为该州首位电力来源。
这一里程碑在 Hacker News 上引发了关于州级能源报告重要性的辩论。怀疑论者认为,此类数据具有误导性,因为各州并非作为独立的电网运行;相反,它们在更大的区域互联网络中运作,因此基于州界线进行的电网稳定性声明在技术上是不准确的。其他人则提供了犹他州能源现状的背景信息,指出该州对太平洋电力公司(PacifiCorp)等平衡机构的依赖,并指出全美范围内煤炭发电的衰退——自2010年以来,由于太阳能、风能和天然气的经济性更具优势,煤炭发电量已下降了43%。
最终,尽管这份报告凸显了犹他州太阳能应用的一个重要里程碑,但这场讨论也强调了在区域电网互联的背景下,解读能源数据的复杂性。
当Flock的摄像头导致我被错误拦截后,其首席执行官面对了我。 Flock's CEO Faced Me After Its Cameras Led to My Wrongful Stop
4 小时前
本期播客摘要介绍了一场坦诚的访谈,由《The Drive》的 Joel Feder 与 Flock Safety 首席执行官 Garrett Langley 进行,讨论了围绕警方使用人工智能车牌识别系统的争议。 讨论的核心是近期发生的一起事件:Feder 因联邦调查局(FBI)全国犯罪信息中心(NCIC)数据库中一个错误的局部车牌录入,而被警方包围。Langley 解释称,Flock 的系统放大了人为错误,并指出 NCIC 数据库已过时,缺乏现代化的反馈或过期机制。他主张进行系统性现代化改革,例如对“黑名单”条目设置强制过期日期,并加强跨部门协作,以防止类似的误报发生。 Langley 为 Flock 在公共安全中扮演的角色进行了辩护,援引了“99% 的成功率”,并声称该技术每年有助于侦破超过一百万起犯罪案件。他坚持认为,尽管隐私和第四修正案方面的担忧合理,但这些仍属于城市议会监管的地方政策范畴。在回应此前将破坏者称为“国内恐怖分子”的争议言论时,Langley 澄清了他对和平政治异见(他表示欢迎)与公共财产破坏(他认为属于重罪)之间做了区分。
这篇 Hacker News 帖子围绕近期一起事件展开:一名记者因 Flock Safety 的自动车牌识别系统(ALPR)误判其车辆而被警方错误拘留。讨论显示出人们对 Flock 及更广泛的监控国家体系持有极深的怀疑态度。
尽管一些评论者认为错误源于警方的失职和数据录入不当,而非软件故障,但许多人反驳称,Flock 的商业模式本质上助长了“大规模跟踪”,并成为警方权力滥用的“催化剂”。批评者认为,即使该技术按预期运行,其使用也创造了一个缺乏问责机制、不透明的危险系统。
该帖子还强调了人们对 Flock 首席执行官的不满,他声称州级监管是解决这些问题的唯一途径。用户一致拒绝这一说法,认为这是一种“逃避问责”的行为,并指出科技领袖应主动行使道德判断,而不是将公司造成的负面影响归咎于法律的缺失。归根结底,参与者达成的共识是极度的不信任,许多人将该公司视为对公民自由的威胁,并呼吁彻底拆除此类监控基础设施。
前卡内基梅隆大学教授兼数据库专家将加入 ClickHouse,创立并领导一个新的研究机构“ClickHouse Labs”。基于他对 ClickHouse 高性能 C++ 架构的长期推崇,他旨在打造一个行业领先的研究中心,以弥合学术理论与实际应用之间的鸿沟。 与独立的研究小组不同,ClickHouse Labs 将直接与工程团队整合,以改进现有技术并加速实验性优化的部署。该实验室将同时关注 ClickHouse 和 PostgreSQL,致力于解决性能、可靠性以及人工智能技术集成方面的挑战。具体而言,团队将探索数据库如何更好地支持自主智能体,以及这些智能体如何反过来实现数据库开发的自动化与改进。 通过将科学严谨性与工程实践相结合,ClickHouse Labs 期望能够重现 IBM 和微软研究院等传奇行业研究机构的影响力。这一举措展现了该机构在推动数据库系统基础科学发展的同时,确保 ClickHouse 始终处于行业前沿的决心。
数据库专家兼教育家 Andy Pavlo 已加入 ClickHouse,并将负责领导新成立的研究机构“ClickHouse Labs”,致力于推动数据库技术的发展。该计划旨在弥合学术研究与工程实践之间的鸿沟,其模式与 IBM Research 和 Microsoft Research 等将行业与研究相结合的模式相呼应。
这一公告在 Hacker News 上引发了热烈讨论。许多用户对这一举措表示赞赏,称赞 Pavlo 在卡内基梅隆大学(CMU)极具影响力的数据库系列课程,以及他长期以来对 SQL 的倡导。支持者认为,该实验室将成为一个至关重要的桥梁,使 ClickHouse 能够保持其在以性能为核心的分析型数据库领域“处于最前沿”的地位。
批评者和质疑者则对商业产品设立专门研究机构的必要性提出了疑问,一些人还就“硬科技”的定义展开了辩论,并讨论大学环境是否仍是进行高影响力数据库创新的最佳场所。尽管各方反应不一,但普遍共识是:Pavlo 的加入是 ClickHouse 生态系统的一个重要里程碑,标志着公司将在突破数据库性能极限方面投入巨资。

Hacker News 上的一场讨论关注了有关 Taylor Farms 十六天内四次更新其关于环孢子虫(*Cyclospora*)污染声明的报道。
评论者们对这些频繁修订的含义看法不一。一些人认为,由于环孢子虫疫情因潜伏期长而难以追踪,随着新信息的出现定期更新声明是一种负责任且合乎预期的做法。另一些人则对此持怀疑态度,认为这些修订可能出于政治动机,特别是在该公司首席执行官与白宫会面之后。
除了 Taylor Farms 的具体案例外,该讨论帖还引发了关于食品供应链透明度的更广泛讨论。用户们辩论了要求餐馆披露原料来源在后勤和成本方面的挑战,并质疑为何食品标签法未能进一步延伸至餐饮服务业,以便为消费者提供更高的透明度。该原始文章来源(一个法律博客)的批评者将其称为利己行为,指出作者可能会从围绕此次疫情的诉讼中获利。
 特朗普总统已公开要求石油公司立即降低汽油价格,目前全国平均油价仍维持在每加仑4美元以上。这一门槛在政治上十分敏感,尤其是在距离中期选举不足100天的情况下。
随着美国与伊朗之间的紧张局势升级,近期燃油价格飙升。不过,由于两国均释放出潜在的外交解决信号,涨势已开始趋稳。由于高昂的能源成本已成为严重的政治包袱,政府正优先进行磋商,以防止油价进一步上涨。尽管如此,分析人士警告称,供应限制(特别是柴油供应)表明燃油价格在可预见的未来可能仍将维持高位。
特朗普总统已公开要求石油公司立即降低汽油价格,目前全国平均油价仍维持在每加仑4美元以上。这一门槛在政治上十分敏感,尤其是在距离中期选举不足100天的情况下。
随着美国与伊朗之间的紧张局势升级,近期燃油价格飙升。不过,由于两国均释放出潜在的外交解决信号,涨势已开始趋稳。由于高昂的能源成本已成为严重的政治包袱,政府正优先进行磋商,以防止油价进一步上涨。尽管如此,分析人士警告称,供应限制(特别是柴油供应)表明燃油价格在可预见的未来可能仍将维持高位。
洛杉矶娱乐产业正面临一场生存危机,因为影视制作正日益向海外以及亚特兰大和温哥华等拥有丰厚激励政策的中心迁移。受2023年罢工和环境灾难的推波助澜,“留在洛杉矶”(#StayInLA)等基层运动凸显了“幕后”岗位从好莱坞流失的现状。 从历史上看,好莱坞曾作为一个高效、集中的“工厂”系统运作。然而,随着大预算、实景依赖型大片的兴起,以及行业对税收抵免以抵消飙升制作成本的依赖,这种模式已经崩溃。这种转变不仅使故事脱离了其叙事背景——导致了诸如用多伦多充当纽约这类“地理模仿”现象——还引发了一种经济层面的“成本病”。 结果,洛杉矶已从一个繁忙的制作中心转变为高管和白领决策者的企业中心。尽管观众可能未必总能察觉到实景拍摄真实感的丧失,但这种迁移标志着深刻的结构性变革,导致传统的好莱坞生态系统被掏空,并越来越依赖全球外包、税收激励,以及最终依赖人工智能,以在高成本时代保持财务上的可行性。
好莱坞电影制作的衰落是一场多层面的危机,其主要驱动力在于对税收优惠的追求以及洛杉矶高昂的生活成本。Hacker News 上的评论者指出,电影制作已大量转移到佐治亚州和英国等提供更优越财务环境的地区。即便是在这些中心地区,也存在着一种“竞相逐底”的现象,制片厂不断迁往劳动力和补贴成本最低的地方。
除了税收结构之外,该行业还受到加州高昂运营成本的困扰,这已将资深专业人士挤出了市场。虽然有人将高额开销归咎于限制性的工会政策,但也有人提出了“万物皆因住房论”,认为高昂的房地产成本使得本土制作相较于全球其他替代方案而言难以为继。
行业向流媒体模式的转变、对 CGI 的依赖以及 AI 取代岗位的潜在威胁,进一步边缘化了当地的剧组人员。最终,舆论一致认为,“好莱坞”已经转变为制片厂高管的企业总部,而电影制作中真正的创作和体力劳动已变成一种流动的、全球化的、且日益不稳定的追求。

 DeepSeek 发布了 V4-Flash 模型,其运行成本仅为 3 美分,比美国领先的模型便宜 100 多倍,这标志着人工智能格局发生了巨大转变。虽然 Anthropic 和 OpenAI 等公司的前沿模型在复杂、多步骤任务中仍保持性能优势,但中国实验室正迅速主导“日常高频”市场。
这种激进的定价策略是国内和全球市场份额争夺战的一部分,并得到了国家资本的支持。随着 DeepSeek 和阿里巴巴等公司不断削减成本并发布高性能模型,行业正见证代币定价能力的急剧下降。这一趋势对目前支撑美国硬件和数据中心投资的大规模资本支出周期构成了威胁。
从本质上讲,中国人工智能公司正利用国家支持的资金将推理过程商品化。随着这些模型变得更易获取且更便携,美国公司所拥有的“前沿溢价”正受到直接威胁。如果即将发布的更强大模型能维持这种超低成本,那么目前支撑高成本人工智能的性能差距可能会很快消失,从而迫使西方实验室面对一种全新的、竞争激烈的经济现实。
DeepSeek 发布了 V4-Flash 模型,其运行成本仅为 3 美分,比美国领先的模型便宜 100 多倍,这标志着人工智能格局发生了巨大转变。虽然 Anthropic 和 OpenAI 等公司的前沿模型在复杂、多步骤任务中仍保持性能优势,但中国实验室正迅速主导“日常高频”市场。
这种激进的定价策略是国内和全球市场份额争夺战的一部分,并得到了国家资本的支持。随着 DeepSeek 和阿里巴巴等公司不断削减成本并发布高性能模型,行业正见证代币定价能力的急剧下降。这一趋势对目前支撑美国硬件和数据中心投资的大规模资本支出周期构成了威胁。
从本质上讲,中国人工智能公司正利用国家支持的资金将推理过程商品化。随着这些模型变得更易获取且更便携,美国公司所拥有的“前沿溢价”正受到直接威胁。如果即将发布的更强大模型能维持这种超低成本,那么目前支撑高成本人工智能的性能差距可能会很快消失,从而迫使西方实验室面对一种全新的、竞争激烈的经济现实。
多年以来,软件工程师很少为自己编写定制工具,因为维护成本往往高于其实用价值。我们不得不依赖死板的现成软件,仅能通过插件或配置文件进行表面的修改。 如今,AI 智能体从根本上改变了这种投资回报率。通过让智能体访问应用程序的源代码,你可以通过简单的自然语言提示来个性化软件,而无需学习复杂的代码库或局限于有限的 API。智能体可以承担繁重的编码工作,更关键的是,它能自动处理将本地更改与上游更新进行合并(rebase)的持续维护工作。 这一转变标志着“插件时代”的终结。开发者不再是为大众构建通用的、高度可配置的软件,我们正在进入一个用户可以根据自身需求塑造开源软件的时代。如果某个工具的使用方式不符合你的心意,你只需告诉智能体重写它即可。因此,软件及其开发公司必须转型为完全可个性化,才能保持竞争力。归根结底,在新范式下,为了让软件真正发挥作用,其源代码必须是可获取的;缺乏深度个性化钩子的闭源工具正逐渐走向淘汰。
这篇 Hacker News 的讨论探讨了开源开发者工具的推广与实际维护及定制化需求之间的矛盾。
开源支持者(如 Simon Willison)认为,大语言模型(LLM)改变了范式,使用户能够更轻松地检查、修改和构建软件,从而重振了开源自由的初衷。
相反,另一些人则更看重实用性而非意识形态。有人指出,商业化托管工具(如 `tern.sh`)在团队协作功能和可靠性方面更具优势,开发者往往更偏爱那些“拿来即用”的工具,而不是需要自己维护的方案。
此次讨论还强调了利用 LLM 通过修改源代码来进行琐碎定制(如更改字体大小)的低效性,认为这本应通过传统的配置文件来完成。虽然一些人将 AI 驱动的定制化视为实现用户完全自主的途径,但批评者警告称,这种方式会导致“浪费”能源,且当用户定制了关键工具并最终不得不自行修复因定制而引发的故障时,会演变成一场维护噩梦。总而言之,各方共识体现了开源的哲学自由与托管方案的实际可靠性之间的分歧。