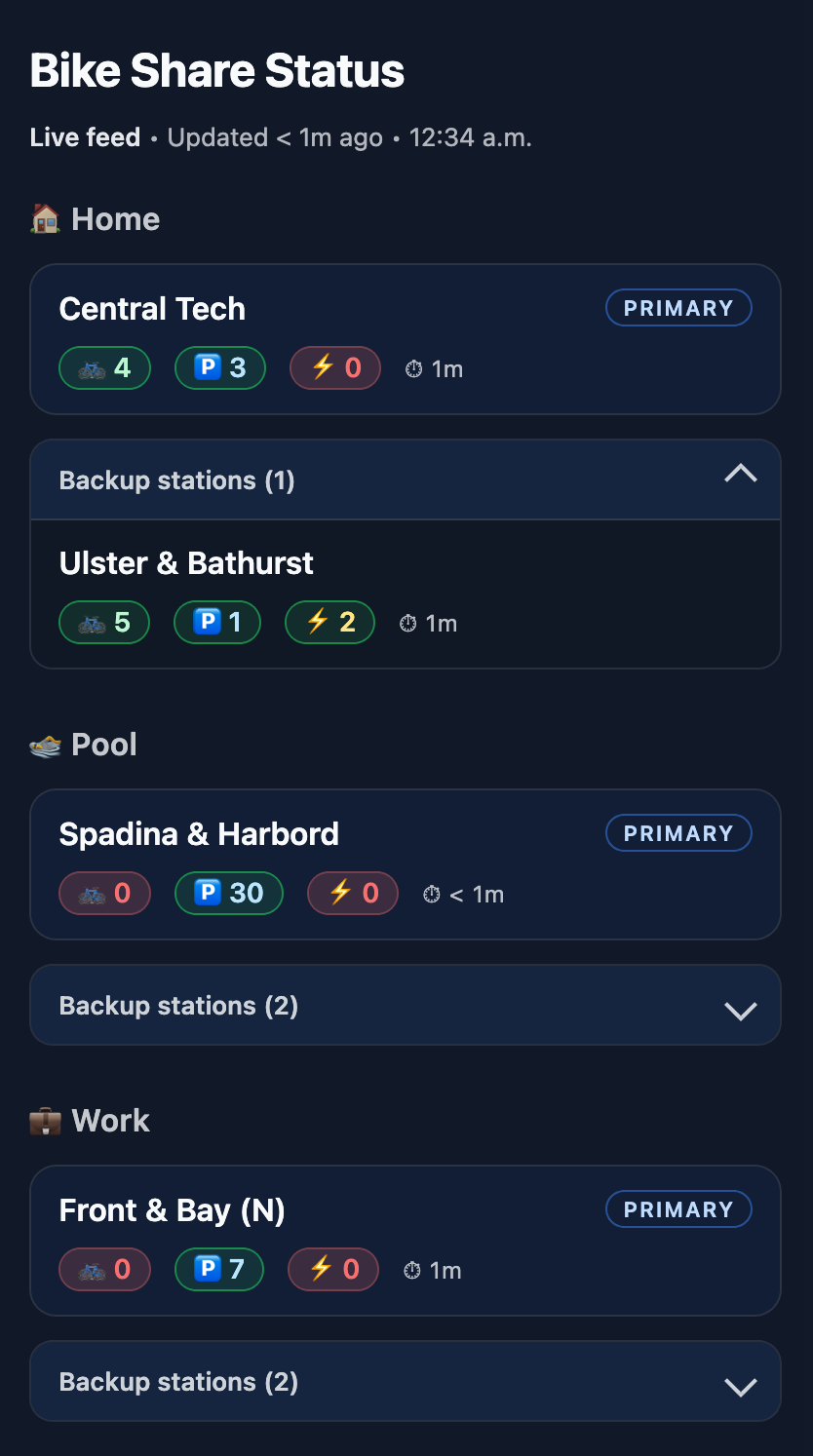
 2025年10月24日,仅供娱乐。我喜欢多伦多的自行车共享网络,但经常发生的情况是离我最近的自行车站点没有自行车,或者我要前往的地方没有停车位。自行车共享应用程序有点笨重,需要多次点击和滚动才能查看所有这些信息。为了节省早上的几秒钟,我做了理所当然的事情,花费了几个小时制作了一个简单的仪表盘和iOS小部件,以便一目了然地显示我需要的信息。 在GitHub上查看该项目:这里有一些仪表盘和小部件实际运行的截图:多伦多自行车共享——仪表盘概览。显示收藏站点的iOS Scriptable小部件。
2025年10月24日,仅供娱乐。我喜欢多伦多的自行车共享网络,但经常发生的情况是离我最近的自行车站点没有自行车,或者我要前往的地方没有停车位。自行车共享应用程序有点笨重,需要多次点击和滚动才能查看所有这些信息。为了节省早上的几秒钟,我做了理所当然的事情,花费了几个小时制作了一个简单的仪表盘和iOS小部件,以便一目了然地显示我需要的信息。 在GitHub上查看该项目:这里有一些仪表盘和小部件实际运行的截图:多伦多自行车共享——仪表盘概览。显示收藏站点的iOS Scriptable小部件。
每日HackerNews RSS
一位 Hacker News 用户 alexboden 分享了一个项目,展示了他最喜欢的共享单车站点状态。 这篇文章引发了关于类似工具和集成的讨论。
几位评论者提到了现有的资源,例如 [citybik.es](https://citybik.es),一个全球共享单车聚合器,以及一个用于可视化站点数据的 Home Assistant 集成(正在更新以包含更多字段)。
一位用户强调了到达没有手机信号的站点后才检查自行车可用性的沮丧,并计划使用 Lyft 的数据端点为旧金山湾区构建本地显示屏。 其他人分享了替代工具,例如 [tools.encona.com/lyftbike](https://tools.encona.com/lyftbike)。 一个共同的主题是难以找到这些服务的现成 RSS 订阅源。
最后,文章以提醒 Y Combinator 2026 年冬季申请期结束。
![]() ## beaconDB & BLE Beacon 探索:总结
该项目研究了 beaconDB,它是 Mozilla Location Service (MLS) 的后继者,旨在利用蜂窝塔、WiFi 热点和 BLE 信标的观测结果提供位置查找。作者是一位 GrapheneOS 用户,寻求 Google 位置服务的替代方案,希望为 beaconDB 贡献力量并测试其 BLE 信标功能。
实验包括购买 BLE 信标,配置它们广播数据(使用 Feasy FSC-BP104D 型号),并通过 NeoStumbler 和直接 API 调用提交位置观测数据。尽管数据提交成功,但 API 始终返回信标的“404 Not Found”错误。
进一步调查,包括检查 beaconDB 源代码,揭示了核心问题:**beaconDB 目前*存储* BLE 信标数据,但尚未*利用*它来进行地理定位。** 虽然 WiFi 观测成功返回了位置数据,但 BLE 信标功能仍在开发中。
作者向 beaconDB 提交了一个 issue,强调了缺失的地理定位功能。尽管结果出乎意料,但该项目提供了关于 BLE 信标技术、beaconDB API 以及位置服务复杂性的宝贵学习经验。
## beaconDB & BLE Beacon 探索:总结
该项目研究了 beaconDB,它是 Mozilla Location Service (MLS) 的后继者,旨在利用蜂窝塔、WiFi 热点和 BLE 信标的观测结果提供位置查找。作者是一位 GrapheneOS 用户,寻求 Google 位置服务的替代方案,希望为 beaconDB 贡献力量并测试其 BLE 信标功能。
实验包括购买 BLE 信标,配置它们广播数据(使用 Feasy FSC-BP104D 型号),并通过 NeoStumbler 和直接 API 调用提交位置观测数据。尽管数据提交成功,但 API 始终返回信标的“404 Not Found”错误。
进一步调查,包括检查 beaconDB 源代码,揭示了核心问题:**beaconDB 目前*存储* BLE 信标数据,但尚未*利用*它来进行地理定位。** 虽然 WiFi 观测成功返回了位置数据,但 BLE 信标功能仍在开发中。
作者向 beaconDB 提交了一个 issue,强调了缺失的地理定位功能。尽管结果出乎意料,但该项目提供了关于 BLE 信标技术、beaconDB API 以及位置服务复杂性的宝贵学习经验。
## Hacker News 上关于 BeaconDB 和 BLE Beacon 的讨论
最近 Hacker News 上出现了一场关于 [BeaconDB](matthewbrunelle.com) 的讨论,该项目探索了 BLE(低功耗蓝牙)信标用于地理定位。作者正在构建一个用于信标检测的嵌入式设备,灵感来自 Neostumbler 和 WiGLE 的蓝牙地理记录工具。
用户们争论了使用 BLE 信标进行精确位置跟踪的实用性,指出它们的可移植性与 BeaconDB 中用于三角定位的固定 WiFi 接入点形成对比。有人对广播频率表示担忧——认为 1Hz 相比苹果的 iBeacon (10Hz) 和过去的工业应用 (200ms) 来说太慢。电池寿命和拥挤的无线电频率也被讨论。
对话涉及了过去利用信标技术的尝试,包括一个通过 POS 集成自动开/关酒吧消费单的系统。虽然很有前景,但该项目在位置精度和信标安装物流方面面临挑战。最后,一些评论员指出,像 UWB 和苹果的 Nearby Interactions API 等技术可能会取代 BLE,用于精确的近场检测。
启用 JavaScript 和 Cookie 以继续。
## ProEnergy & 数据中心用喷气发动机:摘要
一家公司ProEnergy正在将喷气发动机改造为数据中心的动力来源,引发了网络讨论。虽然看似非常规,但这种做法解决了直接的电力需求,特别是当供应有限时的“峰值”需求——一些电力公司已经通过集装箱发电机来解决这种情况。
讨论强调了由于“邻避”效应和官僚障碍而导致可再生能源基础设施扩张的挑战。人们对喷气发动机与专门设计的涡轮机相比的效率和排放表示担忧,但支持者指出,现代发动机可以实现低氮氧化物排放,并利用现有的涡轮机核心技术。
一些人认为此举是一种短期解决方案,可能受到人工智能预期能源需求激增以及缺乏可快速扩展的替代方案的驱动。另一些人批评这是一种倒退,强调科技公司在宣传“绿色”倡议的同时依赖化石燃料的虚伪性。对话还涉及了负载转移的潜力——仅在可再生能源可用时运行人工智能任务——但承认了最大化数据中心正常运行时间带来的财务压力。
 客户端挑战:您的浏览器已禁用 JavaScript。请启用 JavaScript 以继续。网站的必要部分无法加载。这可能是由于浏览器扩展、网络问题或浏览器设置造成的。请检查您的连接,禁用任何广告拦截器,或尝试使用不同的浏览器。
客户端挑战:您的浏览器已禁用 JavaScript。请启用 JavaScript 以继续。网站的必要部分无法加载。这可能是由于浏览器扩展、网络问题或浏览器设置造成的。请检查您的连接,禁用任何广告拦截器,或尝试使用不同的浏览器。
这个Hacker News讨论围绕着一个新的PyTorch通信API“Torchcomms”。最初由名称引起的困惑——用户开玩笑地将其与无线通信工具甚至真正的火把联系起来——突显了一个更广泛的问题:“Torch”是流行PyTorch机器学习生态系统内许多工具的常见前缀(例如torchvision和torchaudio)。
一位评论员指出,PyTorch是一个广泛使用的ML库,暗示“Torch”命名约定在该领域内已经很成熟。该帖子还包含了一个YC Winter 2026批次的申请公告,截止日期为11月10日。本质上,这个帖子是一个关于特定技术领域命名规范的快速交流,以及一个相关的创业机会。
Agent Lightning:使用强化学习训练Agent(无需代码修改)
Agent Lightning: Train agents with RL (no code changes needed)
37 天前
 ## Agent Lightning:无需重写代码即可优化AI智能体
Agent Lightning 是一款易于使用的工具,可利用强化学习和提示词优化等技术来优化AI智能体——**无需更改现有的智能体代码。** 它兼容 LangChain、AutoGen 等流行框架,甚至适用于原生的 Python OpenAI 设置。
该系统通过追踪智能体交互(提示词、工具调用、奖励)并将这些数据提供给所选算法来工作。 然后,这些算法会优化智能体资源,例如提示词或策略,从而持续提高性能。
主要功能包括多智能体系统中的选择性优化、用于数据管理的中央“LightningStore”以及用于管理学习循环的灵活的Trainer。 Agent Lightning 优先考虑简单性,让开发者专注于他们的核心想法,而不是复杂的 инфраструктура。
DeepWerewolf 和 AgentFlow 等示例展示了其功能。 它是开源的(MIT 许可证),并欢迎贡献——详情请参见他们的 Discord 和文档站点:[https://arxiv.org/abs/2508.03680](https://arxiv.org/abs/2508.03680)。
## Agent Lightning:无需重写代码即可优化AI智能体
Agent Lightning 是一款易于使用的工具,可利用强化学习和提示词优化等技术来优化AI智能体——**无需更改现有的智能体代码。** 它兼容 LangChain、AutoGen 等流行框架,甚至适用于原生的 Python OpenAI 设置。
该系统通过追踪智能体交互(提示词、工具调用、奖励)并将这些数据提供给所选算法来工作。 然后,这些算法会优化智能体资源,例如提示词或策略,从而持续提高性能。
主要功能包括多智能体系统中的选择性优化、用于数据管理的中央“LightningStore”以及用于管理学习循环的灵活的Trainer。 Agent Lightning 优先考虑简单性,让开发者专注于他们的核心想法,而不是复杂的 инфраструктура。
DeepWerewolf 和 AgentFlow 等示例展示了其功能。 它是开源的(MIT 许可证),并欢迎贡献——详情请参见他们的 Discord 和文档站点:[https://arxiv.org/abs/2508.03680](https://arxiv.org/abs/2508.03680)。
微软发布了“Agent Lightning”框架,旨在简化AI智能体的强化学习(RL)训练,而无需修改智能体本身的任何代码。它本质上连接现有的算法,目标是简化训练过程,而不是取代核心RL方法。
Hacker News社区的初步反应不一。一些人认为它在优化LLM智能体方面很有前景,并可能为DSPy等工具提供替代方案,而另一些人则持怀疑态度。 提出的担忧包括缺乏文档、由于依赖于频繁更新的“verl”库而可能存在的不稳定性,以及对其在处理稀疏奖励等复杂任务中的有效性的质疑。
一些评论者开玩笑地猜测,该项目文档的大量内容是由LLM生成的,并指出其风格 необычный。最终,观点从谨慎乐观到不屑一顾,一些人认为该项目优先考虑复杂的展示,而非清晰的功能。
## ASIMO:本田的先锋人形机器人 ASIMO(先进步进创新移动),由本田在2000年至2018年间开发,是一款全球公认的人形机器人,旨在协助人类。它的开发源于数十年的研究,始于1980年代的E系列和P系列机器人——这些是逐步更高级的原型,专注于实现稳定的双足行走。 ASIMO身高4英尺3英寸,其尺寸经过精心设计,旨在为人类环境(如家庭和医院)提供实际帮助。ASIMO配备了先进的传感器、摄像头和强大的计算机,可以识别面部、声音、手势,并自主导航空间,避开障碍物,甚至响应简单的命令。 ASIMO由锂离子电池供电,利用34个伺服电机实现流畅的运动。尽管从未商业销售(估计成本200万至250万美元),ASIMO为本田开发机器人技术提供了一个至关重要的平台。本田于2018年停止开发,并将重点转向将ASIMO的创新应用于更实用、更贴近现实的应用。如今,ASIMO在东京的未来科学馆展出,见证了它的遗产。
## 阿西莫:回顾机器人过去的怀旧
最近的黑客新闻讨论重温了本田的阿西莫机器人,引发了人们对机器人技术未来早期兴奋的回忆。许多评论者回忆起年轻时对阿西莫印象深刻,设想一个机器人协助日常生活的世界。然而,对话也凸显了一种停滞感——尽管阿西莫最初很有前景,但似乎“消失”了。
虽然现在机器人可以执行特定任务,如洗碗或工厂自动化,但真正通用、家用机器人仍然遥不可及。讨论涉及了运动之外的挑战——需要先进的夹具、传感器和人工智能来实现自适应学习。
评论员将阿西莫与波士顿动力公司的Atlas等更近期的进展进行了对比,承认阿西莫在当时是最先进的。一些人甚至指出,像特斯拉的Optimus这样的当前机器人,在动态性能方面可能不如阿西莫鼎盛时期。尽管存在局限性,阿西莫仍然留下了深刻的印象,甚至启发了一些人独特的行走方式!
## APL 数组操作总结 APL 提供了强大的函数来选择和修改数组的部分内容。基本的方括号索引(例如 `TAB[2;1]←8`)允许直接元素赋值。更复杂的选择使用诸如 **Take (↑)**、**Ravel (,)** 和 **Compression (/),** 等函数,通常结合使用。 **Take** 提取数组的一部分,而 **Ravel** 将多维数组展平成向量,从而可以一次性地赋值给整个结构。**Compression** 根据布尔条件选择元素。例如,`(('A'=,MAT)/,MAT)←'*'` 将矩阵中的所有 'A' 替换为星号。 这些函数可以组合起来进行复杂的操作——替换子矩阵,或根据其值或位置有选择地更新元素。数组的形状 (`⍴X`) 也可以用来动态确定选择大小。 **Enlist (∊)** 移除嵌套,允许赋值给嵌套数组中的特定位置。最后,**First (↑)** 选择第一个元素,从而可以替换整个子数组。APL 的灵活性允许进行高度简洁和富有表现力的数组操作。
一个黑客新闻的讨论集中在学习和使用APL,一种20世纪60年代开发的编程语言。用户分享了使用GNU APL的经验,并指出它可以通过C语言进行扩展,以及输入APL独特符号的方法——包括自定义XCompose定义和专门的键盘布局,如USAPLSETI。
对话深入探讨了APL符号编码的历史,以及Unicode之前的状况。在Unicode(1991/1993年推出)之前,需要自定义编码,Dyalog APL仍然支持其原始的、不兼容ASCII的编码。早期的实现甚至使用IBM Selectric打字机上的字符重叠来创建符号。
APLWiki等资源和键盘布局配置链接被分享,为有兴趣探索该语言的人们提供实用建议。该帖子还包含一首以APL为主题的歌曲,以及关于Y Combinator申请的提醒。
## 耐克的 Amplify 项目:为日常运动员提供助力鞋款 耐克正在开发 Amplify 项目,这是一款革命性的助力鞋款系统,旨在让所有水平的跑步和步行更快、更远、更轻松。该系统利用轻量级电机、皮带和可充电电池与碳纤维鞋集成,以*增强*自然的腿部运动——本质上提供了一种类似于“第二组小腿肌肉”的助力。 Amplify 项目的目标是跑速为每英里 10-12 分钟的运动员,它并非关注精英表现,而是为了增加运动的乐趣和可及性。测试表明,用户体验到更少的努力,尤其是在上坡时,并且有可能提高他们的速度。 Amplify 项目与机器人合作伙伴 Dephy 合作开发,并参考了耐克运动研究实验室的大量研究(测试了超过 240 万步!),代表了耐克持续创新的承诺及其对运动对健康至关重要的信念。虽然仍在测试中,耐克设想未来这项技术将扩大跑步和步行的普及度,就像电动自行车对城市通勤的影响一样。
## Amplify 项目:助力鞋履 - 摘要
耐克的“Amplify 项目”推出助力鞋履,旨在辅助步行和跑步。Hacker News 上的讨论引发了关于目标受众的争论,耐克将其定位为“日常运动员”,但许多人认为它更适合行动不便者、康复期患者或希望保持活动水平的老年人。
一些评论员将其与电动自行车相提并论,指出即使存在身体限制,电力辅助也能让人继续参与活动。另一些人强调了对术后恢复或患有慢性疾病的人的潜在益处。人们对自然肌肉发育的影响和对关节的潜在压力表示担忧。
对话还涉及了动力辅助在运动中的更广泛影响,质疑“运动”的定义,并设想未来更广泛地使用外骨骼和增强技术。虽然有些人认为这是一个利基市场,但另一些人认为人口老龄化和对延长运动能力的需求将推动需求。
 ## Linux 中的共享库与加载时重定位
本文解释了 Linux 如何利用加载时重定位来实现共享库的使用。与加载到固定地址的可执行文件不同,共享库会动态加载到可用的虚拟内存中,这意味着它们的最终地址直到运行时才可知。这带来了一个挑战:库中的代码通常引用库*内部*的数据(如全局变量)或其他函数,需要编译期间未固定的地址。
加载时重定位通过最初在库的代码中嵌入占位符地址(如 0x0)来解决这个问题。一个重定位段详细说明了这些占位符的位置以及它们所引用的符号。当库被加载时,动态加载器会根据库的实际运行时地址调整这些占位符,从而有效地“重定位”这些引用。
例如,对库内函数的调用最初包含相对偏移量。动态加载器根据库的加载地址计算绝对地址并更新指令。类似地,对全局变量的访问会被修补为正确的内存位置。
虽然位置无关代码 (PIC) 现在是首选方法,但理解加载时重定位可以提供共享库如何工作的基本理解,并简化对 PIC 概念的掌握。此过程对于现代操作系统的有效内存使用和代码共享至关重要。
## Linux 中的共享库与加载时重定位
本文解释了 Linux 如何利用加载时重定位来实现共享库的使用。与加载到固定地址的可执行文件不同,共享库会动态加载到可用的虚拟内存中,这意味着它们的最终地址直到运行时才可知。这带来了一个挑战:库中的代码通常引用库*内部*的数据(如全局变量)或其他函数,需要编译期间未固定的地址。
加载时重定位通过最初在库的代码中嵌入占位符地址(如 0x0)来解决这个问题。一个重定位段详细说明了这些占位符的位置以及它们所引用的符号。当库被加载时,动态加载器会根据库的实际运行时地址调整这些占位符,从而有效地“重定位”这些引用。
例如,对库内函数的调用最初包含相对偏移量。动态加载器根据库的加载地址计算绝对地址并更新指令。类似地,对全局变量的访问会被修补为正确的内存位置。
虽然位置无关代码 (PIC) 现在是首选方法,但理解加载时重定位可以提供共享库如何工作的基本理解,并简化对 PIC 概念的掌握。此过程对于现代操作系统的有效内存使用和代码共享至关重要。
这篇 Hacker News 帖子推荐了一篇引人入胜的多部分文章,详细介绍了程序执行期间共享库的加载过程。用户 “saltypal” 推荐了这篇以及另外两篇相关文章,还有 glibc 作者关于内存管理的关键论文,并指出这些资源极大地补充了他的计算机科学教育——尤其是在就读文理学院时,缺乏底层细节。
他们强调理解这些概念对于程序性能分析和调试的实用价值。帖子包含推荐文章和资源的链接,供有兴趣深入了解程序加载和内存管理“内部原理”的人参考。它还包含一份 Y Combinator 申请公告。
``` %PDF-1.4 % âãÏÓ 4 0 obj > /PageLabels > ] >> /Outlines 2 0 R /Pages 1 0 R >> endobj 5 0 obj ```
## ARM 内存标记与苹果的增强:摘要
这次黑客新闻的讨论集中在 ARM 的内存标记扩展 (MTE) 以及苹果的实现,名为增强型内存标记扩展 (EMTE),该扩展存在于他们的 M5 芯片和较新的 iPhone 中。MTE 旨在通过在运行时检测内存错误来提高 C/C++ 代码的内存安全性。
苹果的 EMTE 在原始 MTE 的基础上进行了构建,解决了人们认为的弱点,并增加了规范标签检查以及在发生错误时报告所有非地址位等功能。虽然有些人认为 EMTE 主要帮助苹果维护与现有代码库 (XNU) 的兼容性,但它代表着硬件辅助内存安全方面迈出的重要一步。
对话中提到,SPARC 处理器自 2015 年以来就已具备类似技术 (ADI)。英特尔和 AMD 也在致力于开发 x86 对应技术 (ChkTag)。更广泛的观点是,虽然像 Rust 这样的语言提供编译时内存安全,但 MTE 为现有的 C/C++ 应用程序提供了一个有价值的纵深防御层,即使它需要运行时开销,也是一项值得的创新。关于硬件解决方案是否能弥补软件缺陷存在争论,但许多人同意提高内存安全性是一个积极的结果。